#include <fitting.h>
|
| template<typename Model , typename Derived > |
| auto | ceres_fit (const Model &, const typename Model::InputType &, const typename Model::InputDataType &, const typename Model::DataType &, const typename Model::DataType &, const Eigen::DenseBase< Derived > &) |
| |
| template<mapFitter::FitMode fit_mode, typename Derived > |
| auto | fit_to_gaussian (Eigen::DenseBase< Derived > &, Eigen::DenseBase< Derived > &, double, double, double) |
| |
◆ FitMode
| Enumerator |
|---|
| pointing | |
| beammap | |
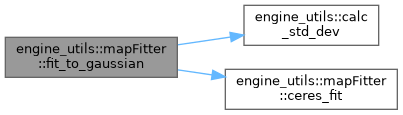
◆ ceres_fit()
template<typename
Model , typename Derived >
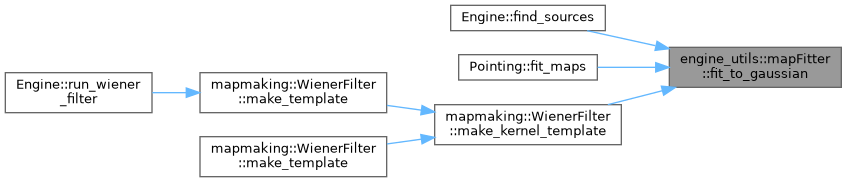
◆ fit_to_gaussian()
| auto engine_utils::mapFitter::fit_to_gaussian |
( |
Eigen::DenseBase< Derived > & |
signal, |
|
|
Eigen::DenseBase< Derived > & |
weight, |
|
|
double |
init_fwhm, |
|
|
double |
init_row, |
|
|
double |
init_col |
|
) |
| |
◆ angle_high
| double engine_utils::mapFitter::angle_high = pi/2 |
◆ angle_low
| double engine_utils::mapFitter::angle_low = -pi/2 |
◆ bounding_box_pix
| double engine_utils::mapFitter::bounding_box_pix |
◆ fit_angle
| bool engine_utils::mapFitter::fit_angle |
◆ fitting_region_pix
| double engine_utils::mapFitter::fitting_region_pix |
◆ flux_high
| double engine_utils::mapFitter::flux_high = 2.0 |
◆ flux_limits
| Eigen::VectorXd engine_utils::mapFitter::flux_limits |
◆ flux_low
| double engine_utils::mapFitter::flux_low = 0.1 |
◆ fwhm_high
| double engine_utils::mapFitter::fwhm_high = 2.0 |
◆ fwhm_limits
| Eigen::VectorXd engine_utils::mapFitter::fwhm_limits |
◆ fwhm_low
| double engine_utils::mapFitter::fwhm_low = 0.1 |
◆ logger
| std::shared_ptr<spdlog::logger> engine_utils::mapFitter::logger = spdlog::get("citlali_logger") |
◆ n_params
| int engine_utils::mapFitter::n_params = 6 |
The documentation for this class was generated from the following file: