base class for time stream data More...
#include <timestream.h>
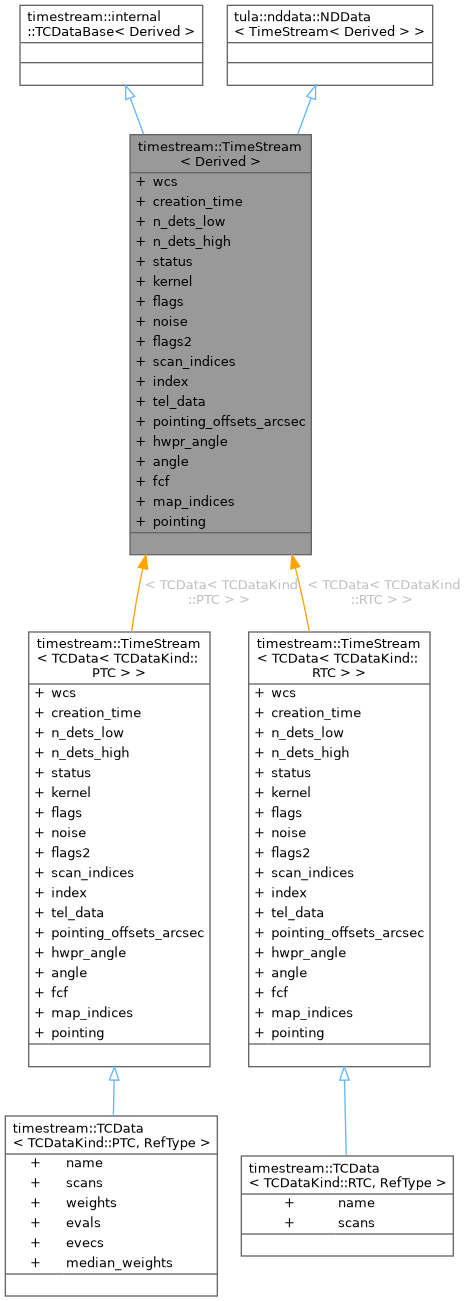
Inheritance diagram for timestream::TimeStream< Derived >:
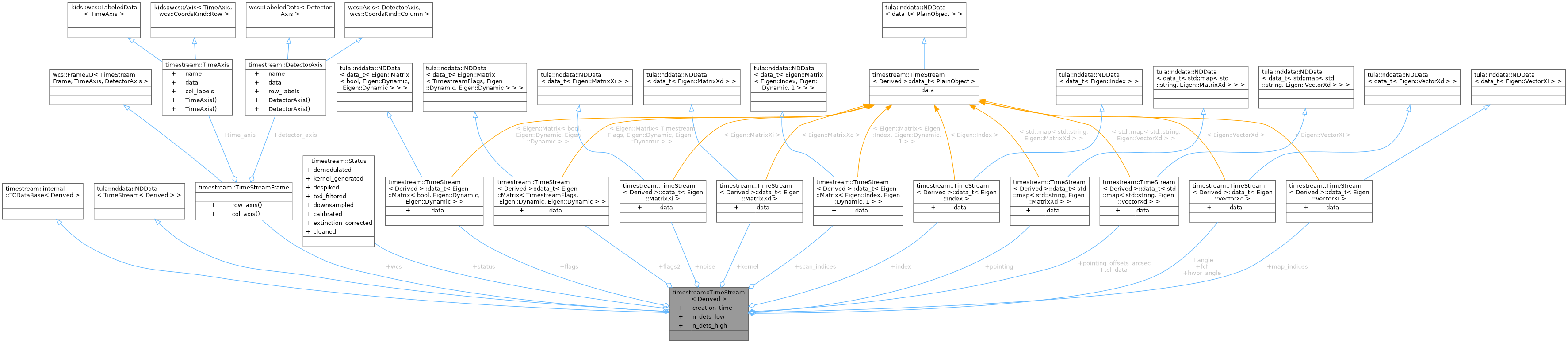
Collaboration diagram for timestream::TimeStream< Derived >:
Classes | |
| struct | data_t |
| struct | dataref_t |
Public Attributes | |
| TimeStreamFrame | wcs |
| std::string | creation_time = engine_utils::current_date_time() |
| int | n_dets_low |
| int | n_dets_high |
| Status | status |
| data_t< Eigen::MatrixXd > | kernel |
| data_t< Eigen::Matrix< bool, Eigen::Dynamic, Eigen::Dynamic > > | flags |
| data_t< Eigen::MatrixXi > | noise |
| data_t< Eigen::Matrix< TimestreamFlags, Eigen::Dynamic, Eigen::Dynamic > > | flags2 |
| data_t< Eigen::Matrix< Eigen::Index, Eigen::Dynamic, 1 > > | scan_indices |
| data_t< Eigen::Index > | index |
| data_t< std::map< std::string, Eigen::VectorXd > > | tel_data |
| data_t< std::map< std::string, Eigen::VectorXd > > | pointing_offsets_arcsec |
| data_t< Eigen::VectorXd > | hwpr_angle |
| data_t< Eigen::VectorXd > | angle |
| data_t< Eigen::VectorXd > | fcf |
| data_t< Eigen::VectorXI > | map_indices |
| data_t< std::map< std::string, Eigen::MatrixXd > > | pointing |
Detailed Description
template<typename Derived>
struct timestream::TimeStream< Derived >
struct timestream::TimeStream< Derived >
base class for time stream data
Member Data Documentation
◆ angle
template<typename Derived >
| data_t<Eigen::VectorXd> timestream::TimeStream< Derived >::angle |
◆ creation_time
template<typename Derived >
| std::string timestream::TimeStream< Derived >::creation_time = engine_utils::current_date_time() |
◆ fcf
template<typename Derived >
| data_t<Eigen::VectorXd> timestream::TimeStream< Derived >::fcf |
◆ flags
template<typename Derived >
| data_t<Eigen::Matrix<bool,Eigen::Dynamic,Eigen::Dynamic> > timestream::TimeStream< Derived >::flags |
◆ flags2
template<typename Derived >
| data_t<Eigen::Matrix<TimestreamFlags,Eigen::Dynamic,Eigen::Dynamic> > timestream::TimeStream< Derived >::flags2 |
◆ hwpr_angle
template<typename Derived >
| data_t<Eigen::VectorXd> timestream::TimeStream< Derived >::hwpr_angle |
◆ index
template<typename Derived >
| data_t<Eigen::Index> timestream::TimeStream< Derived >::index |
◆ kernel
template<typename Derived >
| data_t<Eigen::MatrixXd> timestream::TimeStream< Derived >::kernel |
◆ map_indices
template<typename Derived >
| data_t<Eigen::VectorXI> timestream::TimeStream< Derived >::map_indices |
◆ n_dets_high
template<typename Derived >
| int timestream::TimeStream< Derived >::n_dets_high |
◆ n_dets_low
template<typename Derived >
| int timestream::TimeStream< Derived >::n_dets_low |
◆ noise
template<typename Derived >
| data_t<Eigen::MatrixXi> timestream::TimeStream< Derived >::noise |
◆ pointing
template<typename Derived >
| data_t<std::map<std::string, Eigen::MatrixXd> > timestream::TimeStream< Derived >::pointing |
◆ pointing_offsets_arcsec
template<typename Derived >
| data_t<std::map<std::string, Eigen::VectorXd> > timestream::TimeStream< Derived >::pointing_offsets_arcsec |
◆ scan_indices
template<typename Derived >
| data_t<Eigen::Matrix<Eigen::Index,Eigen::Dynamic,1> > timestream::TimeStream< Derived >::scan_indices |
◆ status
template<typename Derived >
| Status timestream::TimeStream< Derived >::status |
◆ tel_data
template<typename Derived >
| data_t<std::map<std::string, Eigen::VectorXd> > timestream::TimeStream< Derived >::tel_data |
◆ wcs
template<typename Derived >
| TimeStreamFrame timestream::TimeStream< Derived >::wcs |
The documentation for this struct was generated from the following file:
- include/citlali/core/timestream/timestream.h