#include <map.h>
|
| | MapBuffer () |
| |
| | MapBuffer (std::string) |
| |
| void | get_config (tula::config::YamlConfig &, std::vector< std::vector< std::string > > &, std::vector< std::vector< std::string > > &, std::string, std::string) |
| |
| void | normalize_maps () |
| |
| void | calculate_stokes (std::vector< Eigen::MatrixXd > &, const Eigen::MatrixXd &, Eigen::Index, Eigen::Index, int, int) |
| |
| void | calculate_stokes (std::vector< Eigen::Tensor< double, 3 > > &, const Eigen::MatrixXd &, Eigen::Index, Eigen::Index, int, int) |
| |
| void | process_maps_for_pixel (Eigen::Index, Eigen::Index, int, int, const Eigen::MatrixXd &) |
| |
| void | zero_out_maps (Eigen::Index, Eigen::Index, int, int) |
| |
| void | normalize_polarized_maps () |
| |
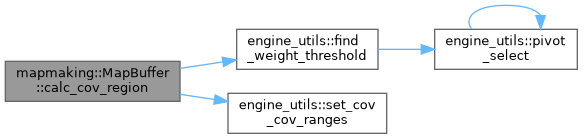
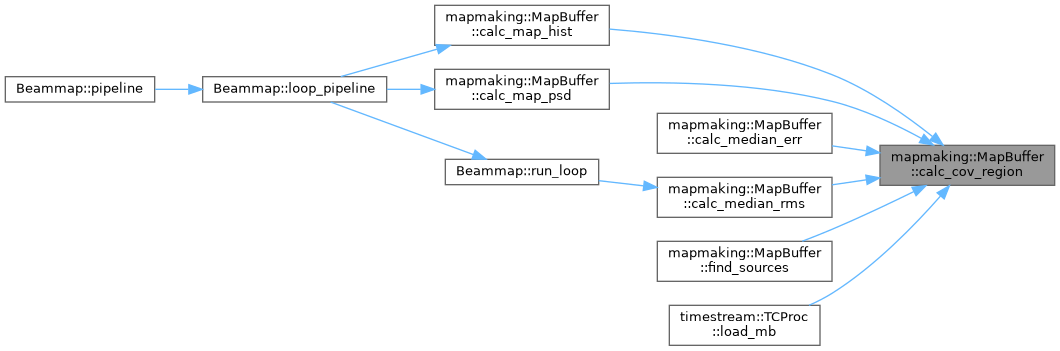
| std::tuple< double, Eigen::MatrixXd, Eigen::Index, Eigen::Index > | calc_cov_region (Eigen::Index) |
| |
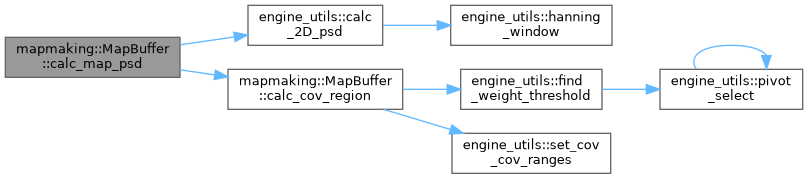
| void | calc_map_psd () |
| |
| void | calc_map_hist () |
| |
| void | calc_median_err () |
| |
| void | calc_median_rms () |
| |
| void | calc_median_rms_annulus (double, double) |
| |
| bool | find_sources (Eigen::Index) |
| |
◆ MapBuffer() [1/2]
| mapmaking::MapBuffer::MapBuffer |
( |
| ) |
|
◆ MapBuffer() [2/2]
| mapmaking::MapBuffer::MapBuffer |
( |
std::string |
_n | ) |
|
◆ calc_cov_region()
| std::tuple< double, Eigen::MatrixXd, Eigen::Index, Eigen::Index > mapmaking::MapBuffer::calc_cov_region |
( |
Eigen::Index |
i | ) |
|
◆ calc_map_hist()
| void mapmaking::MapBuffer::calc_map_hist |
( |
| ) |
|
◆ calc_map_psd()
| void mapmaking::MapBuffer::calc_map_psd |
( |
| ) |
|
◆ calc_median_err()
| void mapmaking::MapBuffer::calc_median_err |
( |
| ) |
|
◆ calc_median_rms()
| void mapmaking::MapBuffer::calc_median_rms |
( |
| ) |
|
◆ calc_median_rms_annulus()
| void mapmaking::MapBuffer::calc_median_rms_annulus |
( |
double |
inner_radius_rad, |
|
|
double |
outer_radius_rad |
|
) |
| |
◆ calculate_stokes() [1/2]
| void mapmaking::MapBuffer::calculate_stokes |
( |
std::vector< Eigen::MatrixXd > & |
map_vec, |
|
|
const Eigen::MatrixXd & |
m, |
|
|
Eigen::Index |
i, |
|
|
Eigen::Index |
j, |
|
|
int |
index, |
|
|
int |
step |
|
) |
| |
◆ calculate_stokes() [2/2]
| void mapmaking::MapBuffer::calculate_stokes |
( |
std::vector< Eigen::Tensor< double, 3 > > & |
map_vec, |
|
|
const Eigen::MatrixXd & |
m, |
|
|
Eigen::Index |
i, |
|
|
Eigen::Index |
j, |
|
|
int |
index, |
|
|
int |
step |
|
) |
| |
◆ find_sources()
| bool mapmaking::MapBuffer::find_sources |
( |
Eigen::Index |
map_index | ) |
|
◆ get_config()
| void mapmaking::MapBuffer::get_config |
( |
tula::config::YamlConfig & |
config, |
|
|
std::vector< std::vector< std::string > > & |
missing_keys, |
|
|
std::vector< std::vector< std::string > > & |
invalid_keys, |
|
|
std::string |
pixel_axes, |
|
|
std::string |
redu_type |
|
) |
| |
◆ normalize_maps()
| void mapmaking::MapBuffer::normalize_maps |
( |
| ) |
|
◆ normalize_polarized_maps()
| void mapmaking::MapBuffer::normalize_polarized_maps |
( |
| ) |
|
◆ process_maps_for_pixel()
| void mapmaking::MapBuffer::process_maps_for_pixel |
( |
Eigen::Index |
i, |
|
|
Eigen::Index |
j, |
|
|
int |
a, |
|
|
int |
step, |
|
|
const Eigen::MatrixXd & |
m |
|
) |
| |
◆ zero_out_maps()
| void mapmaking::MapBuffer::zero_out_maps |
( |
Eigen::Index |
i, |
|
|
Eigen::Index |
j, |
|
|
int |
index, |
|
|
int |
step |
|
) |
| |
◆ col_source_locs
| std::vector<Eigen::VectorXi> mapmaking::MapBuffer::col_source_locs |
◆ cols_tan_vec
| Eigen::VectorXd mapmaking::MapBuffer::cols_tan_vec |
◆ cov_cut
| double mapmaking::MapBuffer::cov_cut |
◆ coverage
| std::vector<Eigen::MatrixXd> mapmaking::MapBuffer::coverage |
◆ crval_config
| std::vector<float> mapmaking::MapBuffer::crval_config |
◆ exposure_time
| double mapmaking::MapBuffer::exposure_time = 0 |
◆ hist_bins
| std::vector<Eigen::VectorXd> mapmaking::MapBuffer::hist_bins |
◆ hist_n_bins
| int mapmaking::MapBuffer::hist_n_bins |
◆ hists
| std::vector<Eigen::VectorXd> mapmaking::MapBuffer::hists |
◆ kernel
| std::vector<Eigen::MatrixXd> mapmaking::MapBuffer::kernel |
◆ map_grouping
| std::string mapmaking::MapBuffer::map_grouping |
◆ map_in_vec
| std::vector<int> mapmaking::MapBuffer::map_in_vec |
◆ map_out_vec
| std::vector<int> mapmaking::MapBuffer::map_out_vec |
◆ median_err
| Eigen::VectorXd mapmaking::MapBuffer::median_err |
◆ median_rms
| Eigen::VectorXd mapmaking::MapBuffer::median_rms |
◆ n_cols
| Eigen::Index mapmaking::MapBuffer::n_cols |
◆ n_noise
| Eigen::Index mapmaking::MapBuffer::n_noise |
◆ n_rows
| Eigen::Index mapmaking::MapBuffer::n_rows |
◆ n_sources
| std::vector<int> mapmaking::MapBuffer::n_sources |
◆ name
| std::string mapmaking::MapBuffer::name |
◆ noise
| std::vector<Eigen::Tensor<double,3> > mapmaking::MapBuffer::noise |
◆ noise_hist_bins
| std::vector<Eigen::VectorXd> mapmaking::MapBuffer::noise_hist_bins |
◆ noise_hists
| std::vector<Eigen::VectorXd> mapmaking::MapBuffer::noise_hists |
◆ noise_psd_2d_freqs
| std::vector<Eigen::MatrixXd> mapmaking::MapBuffer::noise_psd_2d_freqs |
◆ noise_psd_2ds
| std::vector<Eigen::MatrixXd> mapmaking::MapBuffer::noise_psd_2ds |
◆ noise_psd_freqs
| std::vector<Eigen::VectorXd> mapmaking::MapBuffer::noise_psd_freqs |
◆ noise_psds
| std::vector<Eigen::VectorXd> mapmaking::MapBuffer::noise_psds |
◆ obsnums
| std::vector<std::string> mapmaking::MapBuffer::obsnums |
◆ parallel_policy
| std::string mapmaking::MapBuffer::parallel_policy |
◆ pixel_size_rad
| double mapmaking::MapBuffer::pixel_size_rad |
◆ pointing
| std::vector<Eigen::MatrixXd> mapmaking::MapBuffer::pointing |
◆ psd_2d_freqs
| std::vector<Eigen::MatrixXd> mapmaking::MapBuffer::psd_2d_freqs |
◆ psd_2ds
| std::vector<Eigen::MatrixXd> mapmaking::MapBuffer::psd_2ds |
◆ psd_freqs
| std::vector<Eigen::VectorXd> mapmaking::MapBuffer::psd_freqs |
◆ psds
| std::vector<Eigen::VectorXd> mapmaking::MapBuffer::psds |
◆ randomize_dets
| bool mapmaking::MapBuffer::randomize_dets |
◆ row_source_locs
| std::vector<Eigen::VectorXi> mapmaking::MapBuffer::row_source_locs |
◆ rows_tan_vec
| Eigen::VectorXd mapmaking::MapBuffer::rows_tan_vec |
◆ sig_unit
| std::string mapmaking::MapBuffer::sig_unit |
◆ signal
| std::vector<Eigen::MatrixXd> mapmaking::MapBuffer::signal |
◆ smooth_window
| int mapmaking::MapBuffer::smooth_window = 10 |
◆ source_finder_mode
| std::string mapmaking::MapBuffer::source_finder_mode |
◆ source_params
| Eigen::MatrixXd mapmaking::MapBuffer::source_params |
◆ source_perror
| Eigen::MatrixXd mapmaking::MapBuffer::source_perror |
◆ source_sigma
| double mapmaking::MapBuffer::source_sigma |
◆ source_window_rad
| double mapmaking::MapBuffer::source_window_rad |
◆ wcs
| WCS mapmaking::MapBuffer::wcs |
◆ weight
| std::vector<Eigen::MatrixXd> mapmaking::MapBuffer::weight |
The documentation for this class was generated from the following files:
- include/citlali/core/mapmaking/map.h
- src/citlali/core/mapmaking/map.cpp