#include <wiener_filter.h>
Collaboration diagram for mapmaking::WienerFilter:

Public Member Functions | |
| template<typename config_t > | |
| void | get_config (config_t &, std::vector< std::vector< std::string > > &, std::vector< std::vector< std::string > > &) |
| template<class MB > | |
| void | make_gaussian_template (MB &mb, const double) |
| template<class MB > | |
| void | make_airy_template (MB &mb, const double) |
| template<class MB , class CD > | |
| void | make_kernel_template (MB &mb, const int, CD &) |
| template<class MB , class CD > | |
| void | make_template (MB &, CD &c, const double, const int) |
| template<class MB > | |
| void | calc_rr (MB &, const int) |
| template<class MB > | |
| void | calc_vvq (MB &, const int) |
| void | calc_numerator () |
| void | calc_denominator () |
| template<class MB > | |
| void | run_filter (MB &, const int) |
| void | run_convolve () |
| void | destripe (double) |
| template<class MB > | |
| void | filter_maps (MB &, const int) |
| template<class MB > | |
| void | filter_noise (MB &mb, const int, const int) |
| template<class MB > | |
| void | make_gaussian_template (MB &mb, const double) |
| template<class MB > | |
| void | make_airy_template (MB &mb, const double) |
| template<class MB , class CD > | |
| void | make_kernel_template (MB &mb, const int, CD &) |
| template<class MB , class CD > | |
| void | make_template (MB &mb, CD &calib_data, const double gaussian_template_fwhm_rad, const int map_index) |
| template<class MB > | |
| void | calc_rr (MB &mb, const int map_index) |
| template<class MB > | |
| void | calc_vvq (MB &, const int) |
| void | calc_numerator () |
| void | calc_denominator () |
| template<class MB > | |
| void | run_filter (MB &mb, const int map_index) |
| template<class MB > | |
| void | filter_maps (MB &mb, const int map_index) |
| template<class MB > | |
| void | filter_noise (MB &mb, const int map_index, const int noise_num) |
Public Attributes | |
| std::shared_ptr< spdlog::logger > | logger = spdlog::get("citlali_logger") |
| std::string | template_type |
| std::string | filter_type |
| bool | normalize_error |
| bool | uniform_weight |
| bool | run_lowpass |
| int | n_loops |
| int | max_loops = 500 |
| double | denom_limit = 1.e-4 |
| double | psd_lim = 1.e-4 |
| double | init_fwhm |
| std::map< std::string, double > | template_fwhm_rad |
| int | n_rows |
| int | n_cols |
| double | diff_rows |
| double | diff_cols |
| std::string | parallel_policy |
| Eigen::MatrixXd | rr |
| Eigen::MatrixXd | vvq |
| Eigen::MatrixXd | denom |
| Eigen::MatrixXd | nume |
| Eigen::MatrixXd | filtered_map |
| Eigen::MatrixXd | filter_template |
| engine_utils::mapFitter | map_fitter |
| bool | run_kernel |
| std::map< std::string, double > | gaussian_template_fwhm_rad |
Member Function Documentation
◆ calc_denominator() [1/2]
| void mapmaking::WienerFilter::calc_denominator | ( | ) |
Here is the call graph for this function:

Here is the caller graph for this function:

◆ calc_denominator() [2/2]
| void mapmaking::WienerFilter::calc_denominator | ( | ) |
◆ calc_numerator() [1/2]
| void mapmaking::WienerFilter::calc_numerator | ( | ) |
Here is the caller graph for this function:
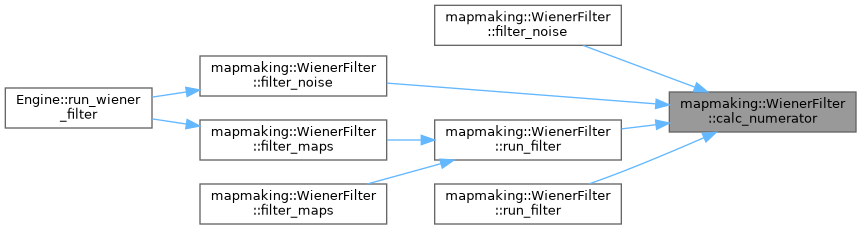
◆ calc_numerator() [2/2]
| void mapmaking::WienerFilter::calc_numerator | ( | ) |
◆ calc_rr() [1/2]
template<class MB >
| void mapmaking::WienerFilter::calc_rr | ( | MB & | mb, |
| const int | map_index | ||
| ) |
Here is the caller graph for this function:

◆ calc_rr() [2/2]
template<class MB >
|
inline |
◆ calc_vvq() [1/2]
template<class MB >
| void mapmaking::WienerFilter::calc_vvq | ( | MB & | mb, |
| const int | map_index | ||
| ) |
Here is the call graph for this function:

Here is the caller graph for this function:

◆ calc_vvq() [2/2]
template<class MB >
| void mapmaking::WienerFilter::calc_vvq | ( | MB & | , |
| const int | |||
| ) |
◆ destripe()
| void mapmaking::WienerFilter::destripe | ( | double | threshold_factor | ) |
◆ filter_maps() [1/2]
template<class MB >
| void mapmaking::WienerFilter::filter_maps | ( | MB & | mb, |
| const int | map_index | ||
| ) |
Here is the call graph for this function:
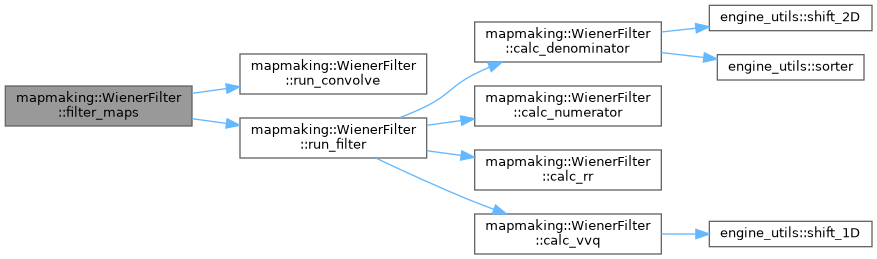
Here is the caller graph for this function:

◆ filter_maps() [2/2]
template<class MB >
|
inline |
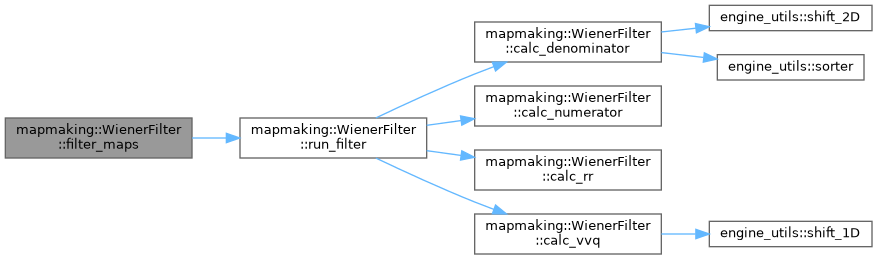
Here is the call graph for this function:
◆ filter_noise() [1/2]
template<class MB >
|
inline |
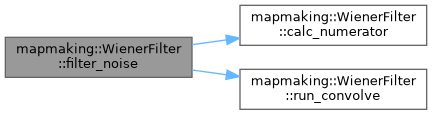
Here is the call graph for this function:

◆ filter_noise() [2/2]
template<class MB >
| void mapmaking::WienerFilter::filter_noise | ( | MB & | mb, |
| const int | map_index, | ||
| const int | noise_num | ||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:

◆ get_config()
template<typename config_t >
| void mapmaking::WienerFilter::get_config | ( | config_t & | config, |
| std::vector< std::vector< std::string > > & | missing_keys, | ||
| std::vector< std::vector< std::string > > & | invalid_keys | ||
| ) |
Here is the call graph for this function:

Here is the caller graph for this function:

◆ make_airy_template() [1/2]
template<class MB >
| void mapmaking::WienerFilter::make_airy_template | ( | MB & | mb, |
| const double | template_fwhm_rad | ||
| ) |
Here is the call graph for this function:

Here is the caller graph for this function:

◆ make_airy_template() [2/2]
template<class MB >
| void mapmaking::WienerFilter::make_airy_template | ( | MB & | mb, |
| const double | |||
| ) |
◆ make_gaussian_template() [1/2]
template<class MB >
| void mapmaking::WienerFilter::make_gaussian_template | ( | MB & | mb, |
| const double | template_fwhm_rad | ||
| ) |
Here is the call graph for this function:

Here is the caller graph for this function:

◆ make_gaussian_template() [2/2]
template<class MB >
| void mapmaking::WienerFilter::make_gaussian_template | ( | MB & | mb, |
| const double | |||
| ) |
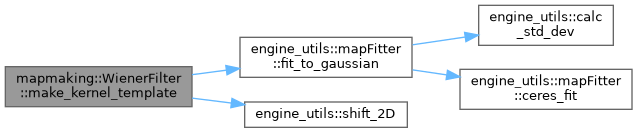
◆ make_kernel_template() [1/2]
template<class MB , class CD >
| void mapmaking::WienerFilter::make_kernel_template | ( | MB & | mb, |
| const int | map_index, | ||
| CD & | calib_data | ||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:

◆ make_kernel_template() [2/2]
template<class MB , class CD >
| void mapmaking::WienerFilter::make_kernel_template | ( | MB & | mb, |
| const int | , | ||
| CD & | |||
| ) |
◆ make_template() [1/2]
template<class MB , class CD >
| void mapmaking::WienerFilter::make_template | ( | MB & | mb, |
| CD & | c, | ||
| const double | template_fwhm_rad, | ||
| const int | map_index | ||
| ) |
Here is the call graph for this function:

Here is the caller graph for this function:

◆ make_template() [2/2]
template<class MB , class CD >
|
inline |
Here is the call graph for this function:

◆ run_convolve()
| void mapmaking::WienerFilter::run_convolve | ( | ) |
Here is the caller graph for this function:

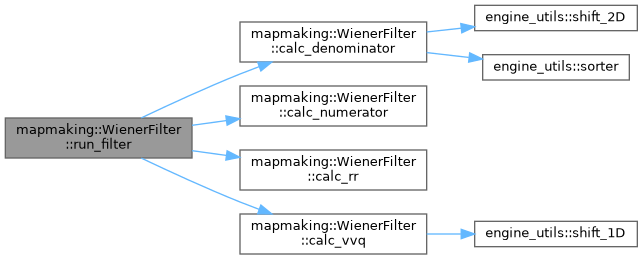
◆ run_filter() [1/2]
template<class MB >
| void mapmaking::WienerFilter::run_filter | ( | MB & | mb, |
| const int | map_index | ||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:

◆ run_filter() [2/2]
template<class MB >
|
inline |
Here is the call graph for this function:

Member Data Documentation
◆ denom
| Eigen::MatrixXd mapmaking::WienerFilter::denom |
◆ denom_limit
| double mapmaking::WienerFilter::denom_limit = 1.e-4 |
◆ diff_cols
| double mapmaking::WienerFilter::diff_cols |
◆ diff_rows
| double mapmaking::WienerFilter::diff_rows |
◆ filter_template
| Eigen::MatrixXd mapmaking::WienerFilter::filter_template |
◆ filter_type
| std::string mapmaking::WienerFilter::filter_type |
◆ filtered_map
| Eigen::MatrixXd mapmaking::WienerFilter::filtered_map |
◆ gaussian_template_fwhm_rad
| std::map<std::string, double> mapmaking::WienerFilter::gaussian_template_fwhm_rad |
◆ init_fwhm
| double mapmaking::WienerFilter::init_fwhm |
◆ logger
| std::shared_ptr<spdlog::logger> mapmaking::WienerFilter::logger = spdlog::get("citlali_logger") |
◆ map_fitter
| engine_utils::mapFitter mapmaking::WienerFilter::map_fitter |
◆ max_loops
| int mapmaking::WienerFilter::max_loops = 500 |
◆ n_cols
| int mapmaking::WienerFilter::n_cols |
◆ n_loops
| int mapmaking::WienerFilter::n_loops |
◆ n_rows
| int mapmaking::WienerFilter::n_rows |
◆ normalize_error
| bool mapmaking::WienerFilter::normalize_error |
◆ nume
| Eigen::MatrixXd mapmaking::WienerFilter::nume |
◆ parallel_policy
| std::string mapmaking::WienerFilter::parallel_policy |
◆ psd_lim
| double mapmaking::WienerFilter::psd_lim = 1.e-4 |
◆ rr
| Eigen::MatrixXd mapmaking::WienerFilter::rr |
◆ run_kernel
| bool mapmaking::WienerFilter::run_kernel |
◆ run_lowpass
| bool mapmaking::WienerFilter::run_lowpass |
◆ template_fwhm_rad
| std::map<std::string, double> mapmaking::WienerFilter::template_fwhm_rad |
◆ template_type
| std::string mapmaking::WienerFilter::template_type |
◆ uniform_weight
| bool mapmaking::WienerFilter::uniform_weight |
◆ vvq
| Eigen::MatrixXd mapmaking::WienerFilter::vvq |
The documentation for this class was generated from the following files:
- include/citlali/core/mapmaking/wiener_filter.h
- include/citlali/core/mapmaking/wiener_filter_omp.h